Autómata;
Trabajo Práctico: Autómata


El trabajo práctico consiste en diseñar y realizar un objeto animado. A partir del concepto “animare” que significa “dar vida”, se propone la creación de un ser artificial que debe adoptar la forma de un animal. A través de su movimiento debe transmitir la impresión de estar vivo. El movimiento debe ser provocado por la acción humana, o por una fuerza externa (aire, agua, peso, presión, mecánica, etc.) .
No estará permitido el uso de motores alimentados con batería, pilas o a cuerda, ni elementos electrónicos.
Formato de entrega
- Objeto animado: El tamaño del “objeto animado” no podrá exceder los 30 cm x 30 cm x 30cm. Los materiales de realización y tecnologías para realizar el movimiento del objeto serán propuestos por el estudiante. El objeto deberá estar rotulado (Cátedra, turno, nombre y apellido del estudiante).
- Blog personal, publicar memoria descriptiva y video:
- El video debe mostrar el objeto animado en funcionamiento. Tener en cuenta la presentación, el entorno, la puesta en escena, la iluminación y el sonido. Duración máxima de 1 minuto. Debe estar subido a Youtube o Vimeo y publicado en el blog.
- La memoria descriptiva del proceso. Publicar en el blog un pequeño informe que debe incluir la idea del trabajo, evolución, problemas encontrados, soluciones, materiales y fotos del proceso y del objeto terminado.
Animales Considerados: Pez Y Pingüino.
Idea Principal: Pingüino.
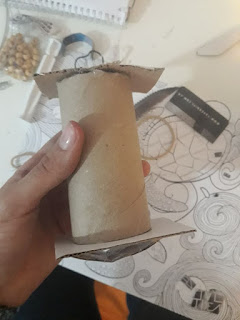
La idea era desarrollar por medio de un sistema bipedal a base de una estructura de alambre con tubos de cartón (o tubos de papel higienico) sostenidos al alambre por medio de un cilindro, que le permitiera movimiento, la caminata de un pinüino.

El sistema respondía al movimiento deseado en esa instancia del desarrollo.
Tras la primer corrección del trabajo y terminar su desarrollo comprobé dos cosas que me hicieron reconsiderar la idea.
El primer punto, fue que el sistema que había pensado para llevar a cabo la caminata del pingüino no se integraba de una manera pareja al animal, sino que debía hacer al animal encajar con el mecanismo.
Y la segunda, fue que, finalizado un primer modelo del sistema, y probarlo, éste no caminaba, sino que se caía hacia adelante.
Comprobé si había algún error con respecto a los tubos, es decir, si estaban disparejos o había más peso de un lado que del otro, pero incluso después de haber intentado corregirlo, el sistema seguía cayéndose hacia adelante, por lo tanto, no funcionó.
Éstos dos puntos me hicieron reconsiderar la idea de hacer un éste animal, o intentar con otra idea.
Debido a que no encontré ningún otro sistema que pudiese integrarse al animal de una manera pareja, es decir, un sistema que se camufle bajo la anatomía natural del animal, pensé en otra idea.
Segunda Idea: Pez.
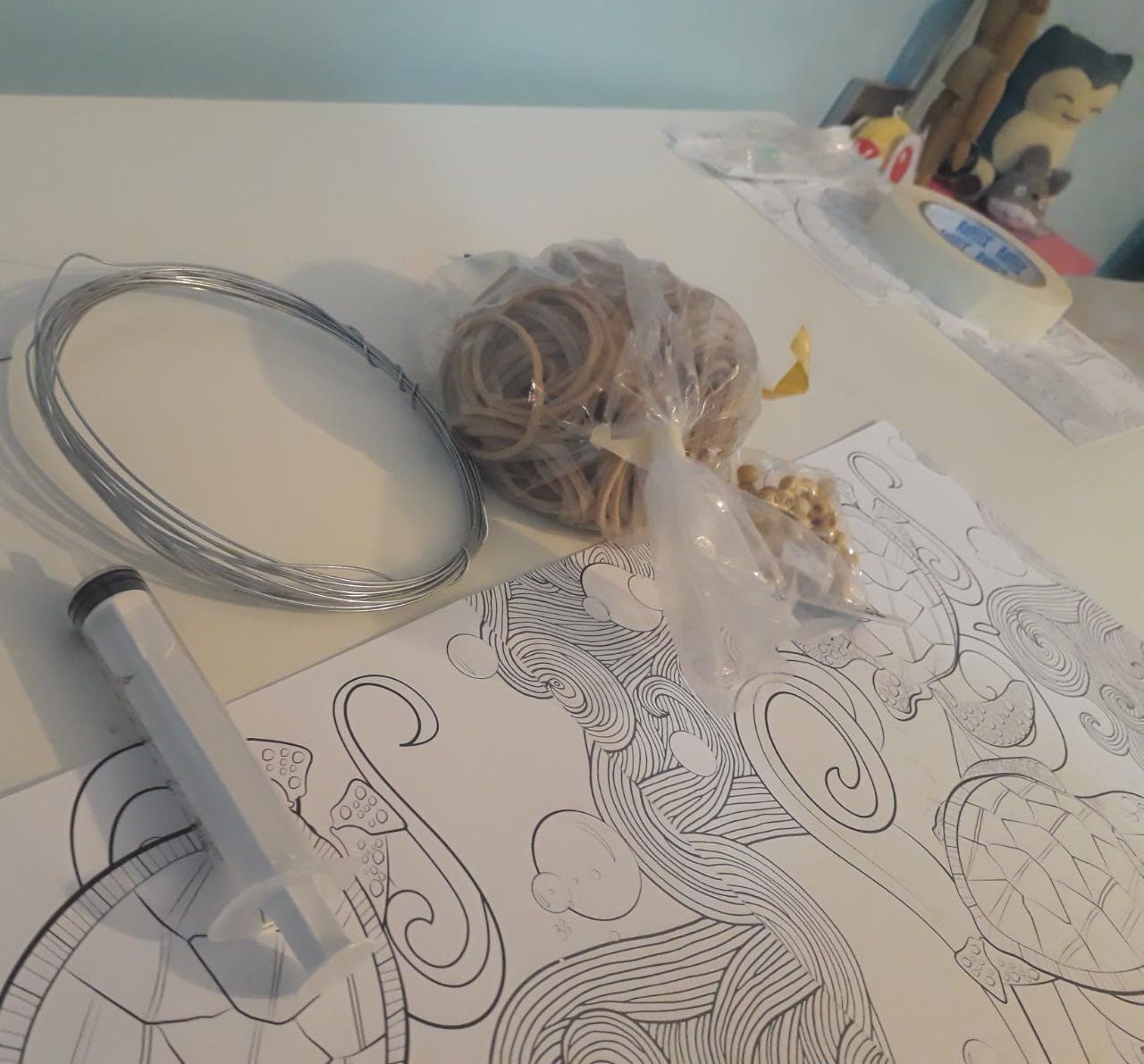
La idea era, simular el movimiento de un pez nadando por medio de un mecanismo a cuerda desarrollado con una gomita de caucho y una jeringa. Las aletas hechas con plástico y telgopor para que no se hundiera en el agua.
El punto a favor que encontré en ésta idea por sobre la otra fue que podía camuflar el mecanismo en la anatomía del animal.
Después de desarrollar el sistema a cuerda, y comprobar que funcionaba. (consiste en moldear un alambre con forma de gancho y pasar la bandita elástica por dentro de la jeringa enganchandola, y tapar la jeringa) tuve el problema de cómo podía resolver las aletas y la cola.
Al final, no utilice plástico porque, incluso con el pegamento de silicona, en el agua se despegaba y cuando no se despegaba no se movía.
Resolví por armarlo todo en tergopol y unirlo con cinta de papel.
Éste fue el resultado:

Artes Multimediales.
Cátedra: Groisman
UNA, turno mañana
Churukian Brenda.

Comentarios
Publicar un comentario